深度分析
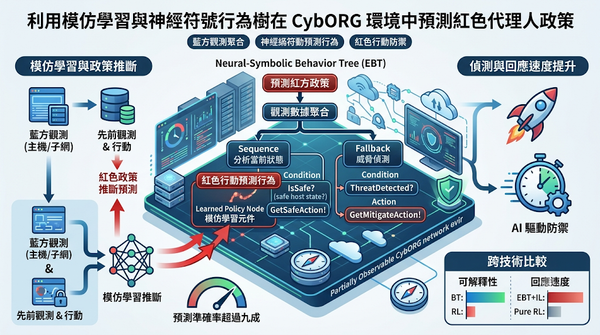
利用模仿學習與神經符號行為樹在 CybORG 環境中預測紅色代理人政策
隨著高階網路攻擊頻傳,研究提出以模仿學習於部分可觀測環境中推斷攻擊者政策,結合神經符號行為樹即時預測紅色行動,實驗顯示在多種攻擊策略下預測準確率超過九成。此方法可在藍方觀測到的主機與子網狀態下,利用先前觀測與藍方行動推斷紅方策略,對比傳統僅依賴藍方行為的 RL 模型,提升偵測與回應速度。
深度分析
隨著高階網路攻擊頻傳,研究提出以模仿學習於部分可觀測環境中推斷攻擊者政策,結合神經符號行為樹即時預測紅色行動,實驗顯示在多種攻擊策略下預測準確率超過九成。此方法可在藍方觀測到的主機與子網狀態下,利用先前觀測與藍方行動推斷紅方策略,對比傳統僅依賴藍方行為的 RL 模型,提升偵測與回應速度。
深度分析
隨著網路攻擊手法日益複雜,研究提出以模仿學習結合神經符號行為樹,從觀測推測紅方策略並即時預測其行動,在多種模擬情境中達到高準確率,提升自律式防禦效能。此方法亦能辨識不同攻擊策略間的切換,並提供防禦方即時調整策略的依據。實驗顯示,在MITRE ATT&CK基礎的CybORG環境中,預測正確率超過九十五%。
深度分析
主動視覺在模仿學習中被視為提升操作能力的關鍵。本文介紹TAVIS基準,包含Head與Hands兩套任務、雙人形軀體與同步頭/固定攝影機比較。提出GALT指標量化預期凝視,並展示主動視覺於部分任務有助提升成功率且對分布轉移敏感。基準還提供ID/OOD切分與公開示例資料便於比較評估。

端對端自駕
端對端自駕依賴模仿學習受示範限制。PaIR-Drive 以平行支路同時進行模仿與強化學習,避免策略漂移。實驗顯示其在 NAVSIM 基準上達到 91.2 PDMS 與 87.9 EPDMS,表現優於傳統微調。