深度分析
AdaHome:以小語言模型實現地端智慧家庭助手,兼顧效率與隱私
智慧家庭助手常依賴大型語言模型與雲端部署,帶來延遲與隱私疑慮。AdaHome 針對在地端小語言模型設計,引入意圖感知規劃框架,依指令類型動態選擇輕量推理或直接執行,並以思路草稿策略提升決策效率。實驗顯示,直接指令準確率達 86.7%,延遲降低最多 3 倍,多輪偏好一致性達 88%,證明小模型也能實現高效個人化控制。
深度分析
智慧家庭助手常依賴大型語言模型與雲端部署,帶來延遲與隱私疑慮。AdaHome 針對在地端小語言模型設計,引入意圖感知規劃框架,依指令類型動態選擇輕量推理或直接執行,並以思路草稿策略提升決策效率。實驗顯示,直接指令準確率達 86.7%,延遲降低最多 3 倍,多輪偏好一致性達 88%,證明小模型也能實現高效個人化控制。

深度分析
安杜里爾與Meta合作試製軍用擴增實境眼鏡,規畫以眼動追蹤、語音與大型語言模型操控無人機與指揮流程,並以Lattice整合多源感測。若量產將改變前線決策與採購格局,但也帶來誤判、續航與供應鏈等重大挑戰。且需在無5G環境下本地運算、抗塵抗爆與長時間續航。

深度分析
在量子計算威脅與行動裝置運算壓力下,本文提出一套輕量量子感知代理AI,將PQC模組的恆定功耗直接納入NOMA多用戶ICE的多階段MINLP建模,透過Lyapunov分解化為逐時子問題,並提出線性複雜度的反向貪婪功率分配法,兼顧排隊穩定與能耗約束,有效提升實時決策與系統吞吐。

AI 硬體
2026 年第一季 AI 硬體市場呈現「訓練到推理」的結構性轉變:NVIDIA 市佔仍高達約 80%,但專為推理優化的 LPU/ASIC 正快速竄起。本文分析推理專用晶片受矚目的原因、對雲端與邊緣部署的影響,並針對個人開發者提出具體採購建議。
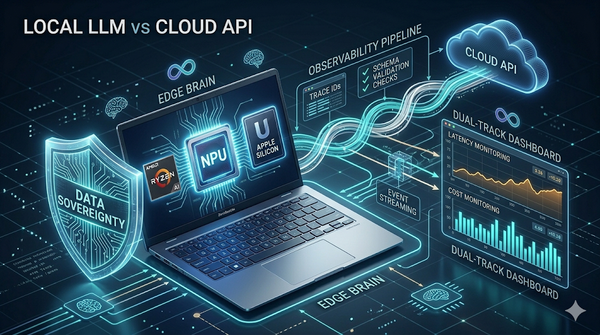
Local LLM
從資深系統架構師角度,說明為何把 AI Agent 建基於 Local LLM(如 Ryzen AI NPU、Apple Silicon 的 Unified Memory)更能滿足資料主權、離線韌性與長期成本效益。文章同時提供工程實務建議:端到端驗證、可觀測性設計、錯誤分級與升級策略,幫助團隊將半自動化轉為可靠自動化。
深度分析
本研究聚焦於分散式邊緣‑雲推測式 LLM 服務的配置挑戰。提出 ConfigSpec 框架,透過效能與功耗剖析,選出草稿模型、量化層級與推測長度的最佳組合。實驗顯示效能、成本與能源效率存在結構性衝突,需動態配置以平衡各目標。

深度分析
隨著使用者期待以自然語言控制智慧家庭,現有方案易因裝置失效而中斷。研究提出 HearthNet,於家庭中樞部署角色專精 LLM 代理,透過 MQTT、Git 共享狀態與授權租約協調裝置。系統實證顯示可解決語意模糊、衝突追蹤與未授權指令問題,提升本地化可靠性。
KD-MARL
面對多代理人強化學習(MARL)部署時的運算瓶頸,新研究 KD-MARL 提出一種資源感知知識蒸餾框架,能將複雜的專家策略轉移至輕量級學生模型。在 SMAC 與 MPE 基準測試中,KD-MARL 成功降低高達 28.6 倍的運算成本,且性能保持率超過 90%,讓 AI 協作能真正進入邊緣設備。