
速報
MemRefine:在記憶預算內優化大型語言模型對話記憶
隨著 LLM 長期對話需求提升,記憶容量受限成瓶頸。研究提出 MemRefine 框架,先用相似度找候選,再由 LLM 判斷事實價值進行刪除、合併或保留,確保在固定預算內仍保留關鍵資訊。實驗證明在多種記憶架構與對話基準中,MemRefine 能維持效能並優於傳統規則方法。
速報
隨著 LLM 長期對話需求提升,記憶容量受限成瓶頸。研究提出 MemRefine 框架,先用相似度找候選,再由 LLM 判斷事實價值進行刪除、合併或保留,確保在固定預算內仍保留關鍵資訊。實驗證明在多種記憶架構與對話基準中,MemRefine 能維持效能並優於傳統規則方法。

速報
近期研究針對前沿人工智慧系統的紅線之一——自主執行可能造成實際危害的網路攻擊,提出全新自主滲透評估框架。該框架以兩層目標伺服器環境(Tier‑1、Tier‑2)共 300 台機器,結合一般化的代理架構與多元資安工具,測試 19 種開放與商業化大型語言模型的滲透能力。

速報
研究檢視大型語言模型(LLM)在捕捉人類道德判斷時的兩大缺陷:回應分布不完整與表述變化導致判斷不穩定。透過兩套資料集——美國 144 個道德情境與國際社會調查計畫 32 國的 38 項道德信念——實驗證明,讓模型同時回報標準差與回應比例,可更完整呈現人類回應範圍;

速報
本研究針對自回歸模型在序列資料(如語言與影片)上的表現進行理論探討,聚焦於部分觀測線性動態系統。研究證明,透過經驗風險最小化訓練的兩層線性自回歸模型,能自然學習到與最佳卡爾曼濾波相同的隱藏狀態估計,儘管模型未直接取得系統動態或狀態資訊。

速報
Meta 最新開發的大型語言模型 Muse Spark 於 Advanced AI Scaling Framework 下完成多項安全評估,涵蓋化學、生物、資安與失控風險。評估顯示,在未加防護前化學與生物能力屬高風險,但透過多層緩解措施後,風險降至可接受範圍,且模型在危險工作流的拒絕表現達到業界最佳。

速報
科學推理常見三種形式:演繹、歸納與因果溯因。現有大型語言模型在科學領域的評測受限於成本高昂且缺乏機制真相的人工標註基準,或是與真實科學文獻相去甚遠的合成測試。研究團隊推出 SciR 基準,結合多範式推理與可控的科學呈現,從形式化的演繹樹、歸納規則假設與因果圖生成題目,確保答案可驗證,並以領域調校的多文件敘事方式呈現。

速報
研究分析了 2017 至 2025 年五大 AI 會議(ACL、CVPR、ICLR、ICML、NeurIPS)共 80,814 篇主題論文,發現 AI 研究主題常以階段性相變方式快速崛起。大型語言模型在 2025 年成為跨會議主導議題,擴散模型亦以類似速度興起,語言模型方法透過視覺語言模型滲入電腦視覺領域,而強化學習則呈平緩成長。

速報
研究推出DecompSR大規模空間推理基準,收錄逾五百萬筆資料,能獨立調整推理深度、實體變化、輸入順序與新詞彙等組合性。此基準以程序化方式生成,並透過符號求解器驗證正確性,提供可細緻探測模型組合推理的工具。測試顯示大型語言模型在生產性與系統性推理上仍有不足。
速報
隨著影像與文字生成模型的突破,如何評估其表現成為焦點。傳統多依賴單一指標,近期引入的精確度與召回率(PR)曲線提供更完整的分析,但估算過程仍具挑戰。本文提出一套以二元分類觀點估算完整 PR 曲線的框架,並進行嚴謹統計分析,導出最小最大上界風險。

速報
隨著人工智慧模型規模與複雜度不斷提升,解釋性已成為了解、除錯與控制模型運算的關鍵需求。現有的解釋方法缺乏統一理論,導致文獻零散、評估標準不一。
速報
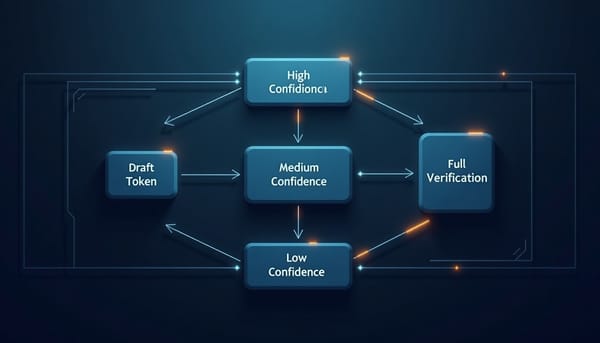
為降低大型語言模型推論成本,研究者提出 VIA‑SD 多層路由驗證架構。系統在推測解碼時先以高信心直接接受,對中等信心的 token 使用輕量子模型重新生成,最後仍交給完整模型驗證。實驗顯示此方式可將拒絕率降低 0.10‑0.22,並提升 10‑20% 解碼速度,兼容現有框架。

速報
隨著AI IDE普及,開發者利用規則文件將專案約束注入LLM上下文。本研究分析83個開源專案與99位開發者,定義出5大類25小類規則分類法。研究發現開發者重視架構約束但實際配置多為格式要求,且更新規則能將AI產出符合率從49.14%提升至72.13%,為優化AI提示策略提供實證基礎。