深度分析
Orbis 2 層次化世界模型:雙層預測架構提升自動駕駛長時域生成穩定性
現有駕駛世界模型多採單一抽象層級,難以兼顧長時域推理與高保真生成。Orbis 2 提出雙層預測架構:高層以壓縮 DINOv2 特徵預測長期場景,低層以 VAE 生成細緻畫面,並以擴散強制預訓練加教師強制微調。在 nuPlan、Waymo 等基準上,FVD、語意分割探測及轉向反應性均達業界最佳。
深度分析
現有駕駛世界模型多採單一抽象層級,難以兼顧長時域推理與高保真生成。Orbis 2 提出雙層預測架構:高層以壓縮 DINOv2 特徵預測長期場景,低層以 VAE 生成細緻畫面,並以擴散強制預訓練加教師強制微調。在 nuPlan、Waymo 等基準上,FVD、語意分割探測及轉向反應性均達業界最佳。
深度分析
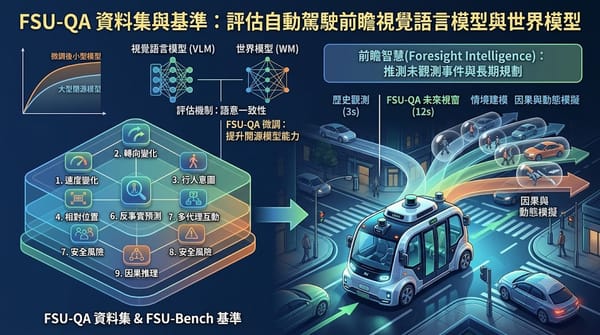
研究背景:視覺語言模型多聚焦於即時感知,忽略未來推測。核心做法:提出FSU‑QA資料集與FSU‑Bench基準,設計九項自駕前瞻任務,並以VLM評估World Model生成之未來影像之語意一致性。主要結果:即使是小型模型經FSU‑QA微調,也能超越多數大型閉源模型,顯示該基準有效提升前瞻推理能力。

深度分析
本研究指出單一擾動即可劫持多模態大語言模型的決策鏈,提出語意感知通用擾動(SAUP)並設計SORT優化演算法,以正規化空間與語意分離提升成功率,實驗在三模型上達到最高66%成功率。此攻擊可在自動駕駛與機器人視覺任務中導致連鎖錯誤,凸顯AI安全防護的急迫性。

速報
自動駕駛的動作規劃存在可驗證安全與泛化能力的兩難。資料驅動最適控制(DDOC)融合最適控制理論與機器學習的自適應能力,提出定制化、動態適應、自我調整三大面向的實作路線圖,並指出未來四個研究方向以縮短實務差距,推動可信且類人化的自動駕駛落地。

特斯拉
特斯拉在奧斯汀展開Cybercab量產,馬斯克則放慢機器人叫車擴張步調。Cybercab為無方向盤、為自動駕駛而生的車款,倚賴未完成的無監督FSD與嚴格驗證流程;公司已向聯邦回報多起碰撞,產能與法規成為擴張瓶頸。馬斯克在財報會上也承認部分早期硬體無法支援無監督駕駛,量產曲線將緩慢上升。

Uber
Uber 於舊金山讓員工測試搭載 Nuro 自駕系統的 Lucid Gravity SUV,車輛配備 Nvidia Drive AGX Thor、固態雷射雷達與高解析度相機,並由安全駕駛員備援。測試驗證自駕堆疊與乘客體驗,為年底公開發佈的高階機器人計程車做準備。